
Rein äußerlich wurde das bewährte ORBIS20 in allen Komponenten ( Träger, Motor, Propeller) vergrößert. Der prinzipielle Aufbau der Konstruktion bleibt jedoch gleich (versteckte Kabelführung, Schneckengetriebe für den Aus- und Einfahrvorgang, mechnische Verriegelung, etc).
Leistung: Bis zu 4.200 Watt Leistung können mit dem wuchtigen Aussenläufer Strecker Motor 560.40 erzielt werden. Damit dürften auch Segler bis zu 50 kg ausreichend motorisiert sein. Die Spannungsversorgung erfolgt über 12s Lipo mit mindesten 6000 mAh Kapazität. Das Triebwerk entwickelt einen Standschub von 20kg. Im vergleichweisen leisen Steigflug fließt mit 12s Lipo ein Strom von 90A. Mit einer 30kg Maschine wird eine Steigrate von 6 m/s erzielt – dies dürfte einen Leistungs-Rekord bei einem Klapptriebwerk darstellen.
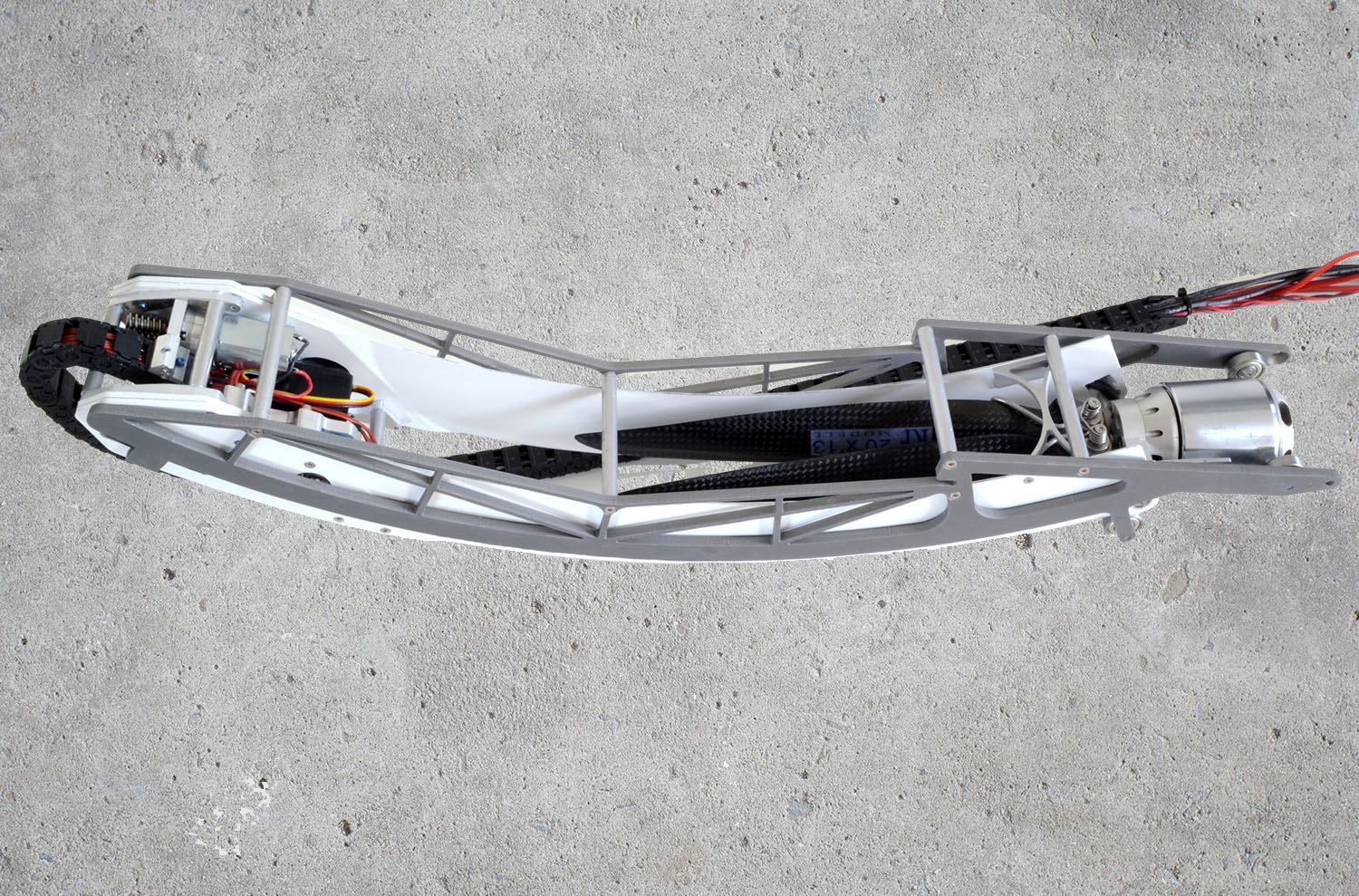
Gute Aerodynamik: Alle Kabelzuführungen und Anlenkungsstangen verlaufen in den beiden nur 7 mm breiten KTW Trägern. Die Rumpföffnung wird durch einen am KTW befestigten Deckel im ausgefahrenen Zustand nahezu vollständig abgedeckt. Der Luftwiderstandswert des KTW wird kaum zu unterbieten sein.
Folgende bewährte Eigenschaften bleiben:
Optimale Lagerung im eingefahrenen Zustand: Der schwere Antriebsmotor ist im eingefahrenen Zustand auf stabilen Kugellagern abgestützt. Eine harte Landung steckt das Triebwerk locker weg.
Vibrationsfrei in allen Drehzahlbereichen: Aerodynamisch und bestückt mit 2 Freudenthaler Carbonblättern 25“ x 12“. Der 2-Blatt Antrieb ist ein guter Kompromiss zwischen dem Wirkungsgrad (am höchsten bei 1-Blatt Prop ) und Vibrationsruhe. Der 2-Blatt Antrieb verbleit ruhig in allen Drehzahlbereichen. Die Blätter sind im Bereich der Federbügel speziell verstärkt.
Leichter Ein- und Ausbau: Der Ein- und Ausbau ist sehr einfach. Es müssen nur noch am Klappenausschnitt ( 175 mm x 105 mm ) 2 Sperrholzbretter angebracht werden. Das ganze Triebwerk lässt sich am Klappenausschnitt mit 2 Inbus-Schrauben lösen. Das KTW kann man in weniger als 5 Minuten komplett aus dem Rumpf ausbauen.
‚Plug and Fly‘: Es muss nur noch der Empfänger, der Regler und der Akku angeschlossen werden. Ein weiteres Verlöten ist nicht notwendig. Danach kann der Betrieb des Triebwerks losgehen.
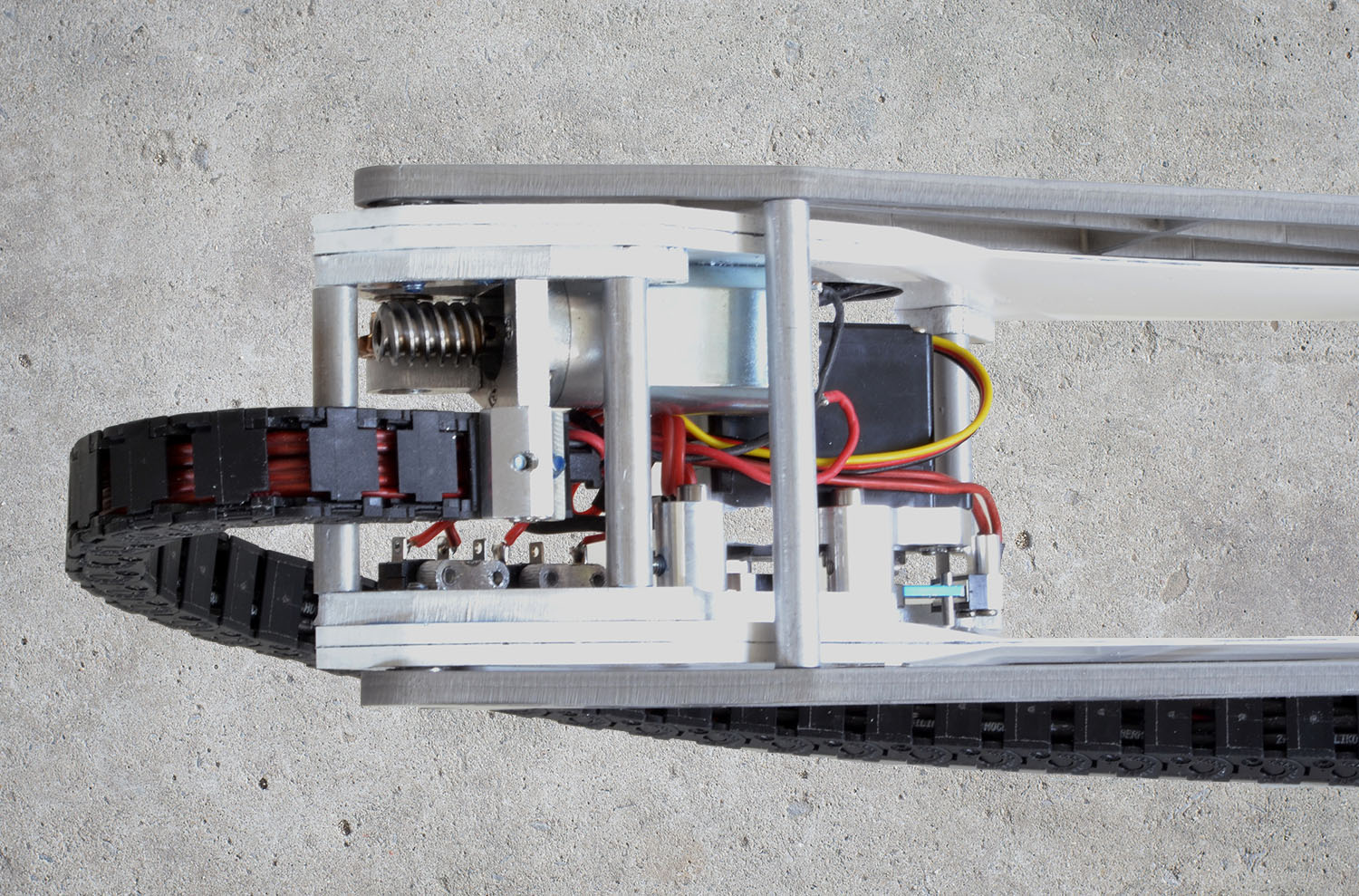
Energiekette: Die gesamten Kabel werden in einer Energiekette sauber geführt und verlaufen in einem Kabelstrang.
Mechanische Verriegelung: Der HiTec 7954 Drehservo des ORBIS verriegelt die CFK-Träger mechanisch in den Aluschienen. Sobald der Motor also in Fahrtstellung ist, ist das CFK-Gestell mechanisch verriegelt. Das Schneckengetriebe sichert das Gestell damit nicht mehr alleine ab.
Steuerung:Die neue Dirk Merbold Steuerung lässt eine manuelle Regelung des Motorgases zu. Der Zahnradmotor zum Aus- und Einfahren wird jetzt ebenfalls über die Dirk Merbold Steuerung versorgt und ist gegen Überlast abgesichert.
![]()
Kugellagerung: Das Trägergestell ist komplett durch Kugellager leichtgängig geführt.
Servo für die Motordrehung/Zwangsverriegelung: Der Servohebel ist in beiden Endstellungen parallel zu der Schubstange und dadurch von allen Kräften entlastet. Beim Kippen des Motors dreht sich der Servohebel insgesamt um 180° und verriegelt gleichzeitig die CFK-Träger mechanisch in den Aluschienen. Im eingefahrenen Zustand ist dieser Servo ohne Stromversorgung.
Carbonträger: Die Träger sind komplett aus Carbon gefertigt. Dies gibt die notwendige Stabilität des Gestells für die auftretenden Schubkräfte von bis zu 20 kg.
Verbesserter Aus- und Einfahrvorgang: Der neue Zahnradantrieb für den Aus- und Einfahrvorgang verrichtet seine Arbeit innerhalb von 7 Sekunden und das nahezu lautlos.
Geringe Schwerpunktverschiebung
Da der schwere Brushless Motor seine Schwerpunktlage nur unwesentlich beim Aus- und Einfahren ändert, ergibt sich eine geringe Schwerpunktverschiebung. Die Flugeigenschaften werden durch das KTW praktisch nicht verändert.
Zuverlässigkeit, Einfachheit
Die Rumpfklappen von den KTW-Trägern werden einfach aufgeschoben. Sie benötigen keinen Servo für diesen Öffnungsvorgang. Dies ist ein weiteres Element für die Zuverlässigkeit: Was nicht benötigt wird, kann auch nicht ausfallen! Der Zahnradmotor treibt über eine Zahnradbahn das KTW Trägergestell aus den Rumpf heraus bzw. hinein. Hinzu kommt die Präzision der CNC-Fertigung, die ihren Beitrag zur Zuverlässigkeit leistet.
Hohe Stabilität
Die beiden KTW Träger sind durch eine Aluminiumbrücke miteinander verbunden. Dies bewirkt eine hohe Stabilität und verhindert ungewünschte seitliche Vibrationen bei allen Motordrehzahlen. Die Trägerarme sind am unteren Ende durch die Powerbox fest verankert. Der schwere Brushless Motor wird im eingefahrenen Zustand durch zwei Kugellager in der Powerbox gehalten. So kann man auch eine härtere Landung unbeschadet überstehen oder enge Loopings ausführen.
Geringer Stromverbrauch
Der Servo für die Motordrehung wird nur beim Ausfahren zugeschaltet. Im eingefahrenen Zustand verbraucht nur die Steuerung von Dirk Merbold eine vernachlässigbare geringe Strommenge. Die Stromversorgung erfolgt über den Antriebsakku. Der Empfängerakku wird also weitestgehend geschont.
Bedienungssicherheit
Das KTW wird über einen 3-Stufen Schalter angesteuert. Die Umsetzung des Empfänger Signals erfolgt durch die KTW Steuerung von Dirk Merbold. Der Regler wird erst über eine Sicherheitsschalter im ausgefahrenen Zustand freigegeben. Der Controler sorgt u.a. für ein langsames Hochfahren des Brushless Motors, regelt die Leistung beim Bodenstart und verhindert ein Einfahren des KTW mit noch laufendem Motor. Das Motorgas kann auch über einen manuellen Kanal angesteuert werden. Auch hier wird ein Einfahren des KTW mit laufendem Motor verhindert.
Ausfallsicherheit
Durch eine einfache mechanische Konstruktion ist ein größtmögliche Zuverlässigkeit gewährleistet.
Regler
Aus Sicherheitsgründen darf das KTW nur mit dem Jeti Master MEZON 170 opto Regler mit den von Thoma Modelltechnik vorprogrammierten Parametern betrieben werden. Diese Parameter gewährleisten die volle Bremsleistung für die Propeller vor dem Einfahren des ORBIS, die richtige Anlaufleistung, der abgestimmte Anlaufpunkt und das richtige Timing. Diese speziellen Regler sind über das Bestellformular auf dieser Website erhältlich.
Das ORBIS 25 Zoll Klapptriebwerk eignet sich zum Einbau in folgende Modelle:
Jonkers H-Model/ Thoma Modelltechnik UG 1:2
ARCUS H-Model/ Thoma Modelltechnik UG 1:2,5
DG1000 Paritech 1:2,25
DG303 Paritech 1:2,25
Der Einbau kann über die Thoma Modelltechnik UG mitbestellt werden.
Das Basispaket des Klapptriebwerks beinhaltet folgende fertig montierte Komponenten:
– kohlefaserverstärktes, aerodynamisch geformtes KTW-Trägergestell mit integriertem Metallgetriebe Digital HV Servo HiTec 7954.
– Alu-Schienensystem zur Führung des KTW-Trägergestells.
– eine KTW Steuerung von Dirk Merbold.
– fertige Verkabelung für die Motorstromversorgung und KTW Steuerung.
– Propmechanismus mit Zwangssynchronisation.
– ein Satz speziell verstärkter Carbon Freudenthaler 25“ x 12“ Propeller-Blätter.
– der Brushless-Aussenläufer LRK 560.40 von RS-LRK-MOTOREN.
Im Basispaket nicht enthalten sind:
– die vorderen beiden Einbauspanten und Befestigungs Kleinteile. Diese müssen im separaten Installationsset bestellt werden.
– der passende Jeti Master MEZON 170 opto/ Antiblitz für den Brushless Motor und die LIPO.
– die Universal-Rumpfabdeckung am KTW-Trägergestell.
– das Programmiergerät für die KTW Steuerung von Dirk Merbold.
Das Klapptriebwerk wird mit folgendem, adaptierten Brushless-Aussenläufer RS-LRK-MOTOREN von Rolf Strecker ausgestattet:
MOTOR LRK 560.40 14-polig Gewicht: 960 Gramm Leistung: bis zu 4.200 Watt Motorwelle: 10 mm Durchmesser: 72 mm
Technische Daten:
KTW Gewicht ( ohne Lipo ): ca. 2750 g
Aus- und Einfahrzeit: ca.7 Sekunden
Leistung: bis 4.200 Watt
Propellerdurchmesser: 25“ Steigung: 12“